
High-Altitude Balloon Payload

The flight is more fully documented on hackaday.io.
The code and design for a Teensy based PiTS tracker is on my github.
Videos
The project video including images from the payload taken during the flight.
Unprocessed video from Brandon's 360° camera during totality.
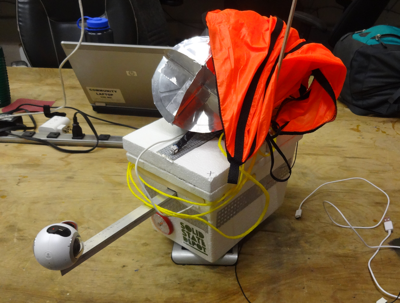
Payload hardware
The Pi In The Sky system records images on the Pi's SD Card as well as transmits a telemetry stream over the LoRa radio. Data includes temperature and GPS location as well as very highly compressed jpeg images. The entire reason behind this payload was to have some image data even if the payload was lost or completely destroyed.
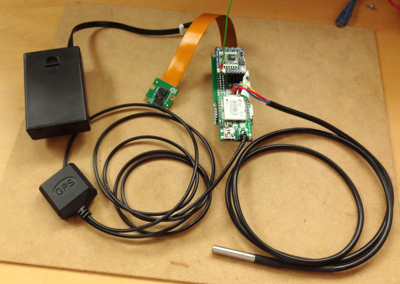
My payload consisted of a Pi Zero, Camera, high-altitude GPS, DS18B20 temperature sensor and RFM95W breakout with quarter-wave antenna. We got packets at distance of over 70 miles. The system was powered by 3 lithium AA cells to handle the cold.
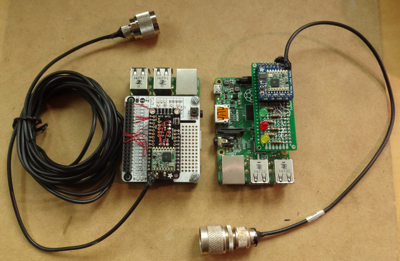
Two Pi receivers were built, one for the launch crew and one for my use in Casper, near where we had estimated touchdown to occur. They, and the payload, ran the PiTs code. I added a LoRa configuration for North America that got up to 1200 bps.
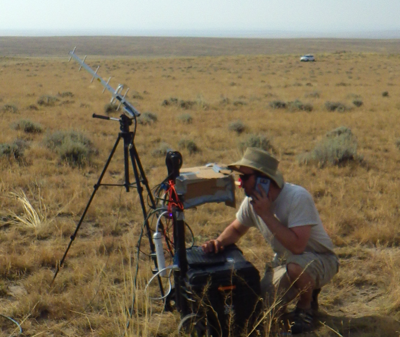
Launch location ground station near Shoshoni, WY. Data was displayed on a monitor attached directly to the receiving Pi. Both ground stations relayed data to habhub when possible and other people could track our flight and view the low-resolution images in real-time.

My ground station in Casper on top of a roof. The Pi connected wirelessly to computers on the dining room table below but I kept having to climb on the roof to aim the antenna.
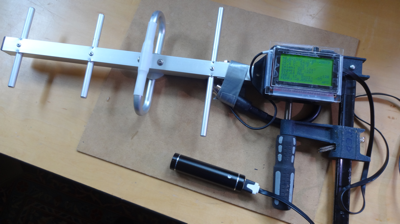
I designed a third receiver using a Teensy LC, RFM95W module and old Sparkfun bit-map LCD display. It parsed the PiTs packets and was designed for the recovery crew to track the payload. Unfortunately we didn't connect the day of the flight and I only got to test it on the roof.

Displaying information about packets received from the payload.
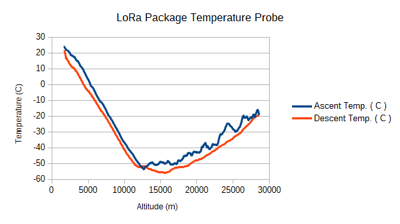
Temperature as recorded by the payload during the flight.
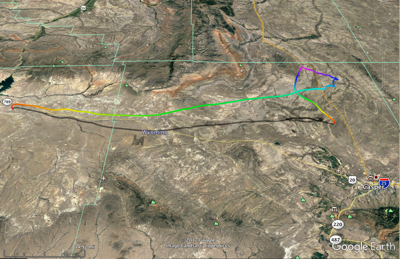
3D GPS data from the flight plotted on google earth.

Unfortunately I lost all the images from the payload after a disk crash. This is an image stored on the payload Pi's SD card during range testing. I hung the payload in a tree on a hill near my house that is on the front range of the Rocky Mountains. Then I drove into eastern Colorado stopping every once in a while to see if I could still receive data. I was able to receive data almost 50 miles away.

This is the same image as received somewhere east of the payload. It shows the effect of lost packets. Each low resolution image requires multiple packets.

Just before the balloon burst at 94,000 feet (28,600 m).